モータドライバ【MX1508】の使い方
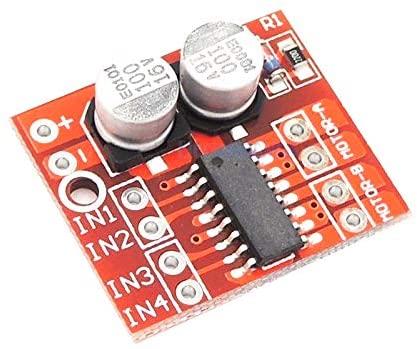
外観

概要
MX1508はHブリッジが2つ入ったDCモータドライバ。簡単にDCモーターを2台動かすことができます。入力端子にPWMを入れることにより速度調節が可能。加熱保護回路付き。
性能
- 動作電圧: DC 2-10V
- 信号入力電圧: DC 1.8-7V
- 単一動作電流: 1.5A
- ピーク電流: 2.5A
- スタンバイ電流: (less than 0.1uA)
- Built-in common conduction circuit, the input terminal vacant, the motor does not malfunction
- Size: 24.7 x 21 x 7mm
- Mounting hole diameter: 2 mm
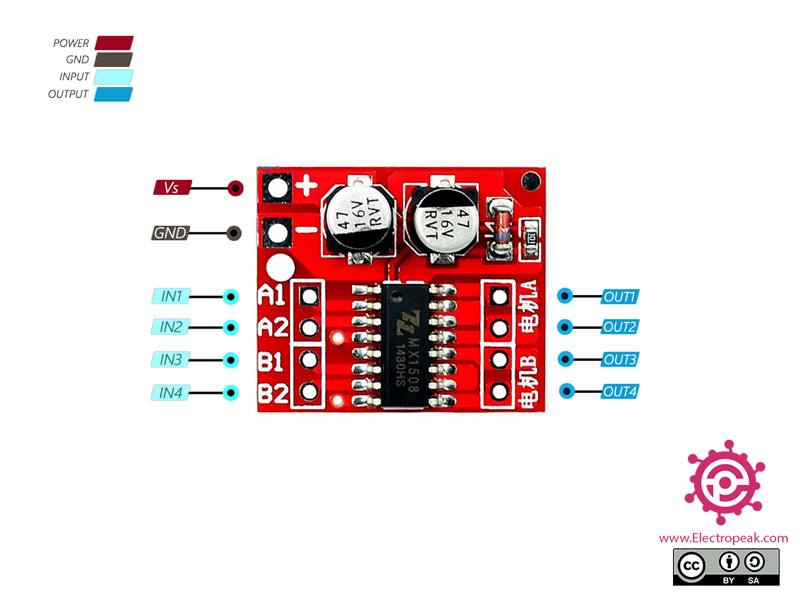
ピン配置
ライブラリ
GitHub - Saeterncj/MX1508: Arduino library for MX1508 dual DC motor driver
Arduino library for MX1508 dual DC motor driver. Contribute to Saeterncj/MX1508 development by creating an account on GitHub.
github.com
回路図
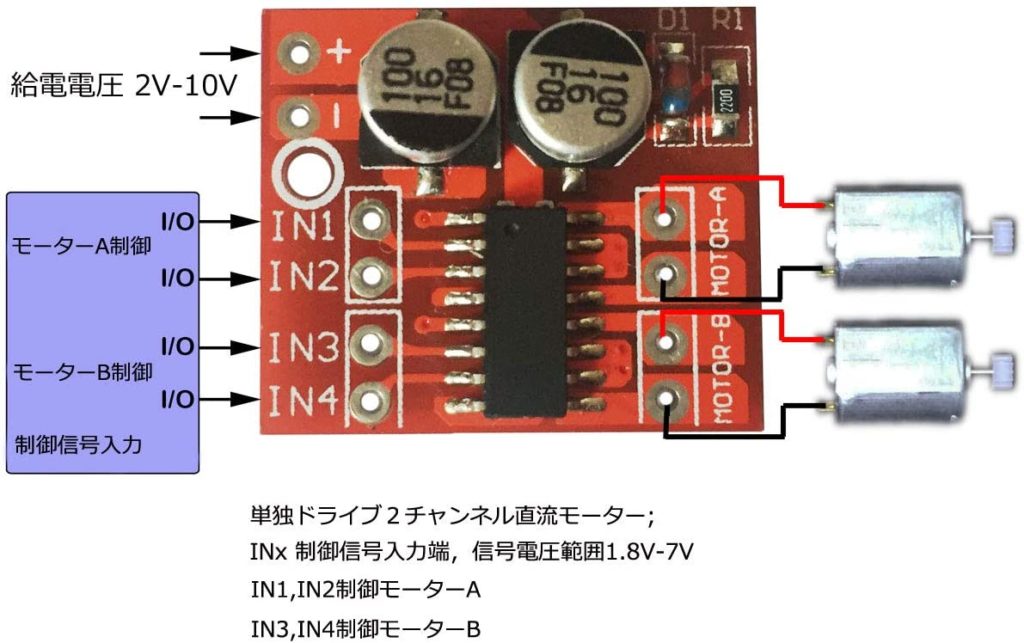
引用 KKHMF商品ページより
プログラミング例
ライブラリを使用する場合
#include <MX1508.h>
#define PINA 9
#define PINB 10
#define NUMPWM 2
#define PWM 100
/*
* MX1508(uint8_t pinIN1, uint8_t pinIN2, DecayMode decayMode, NumOfPwmPins numPWM);
* DecayMode must be FAST_DECAY or SLOW_DECAY,
* NumOfPwmPins, either use 1 or 2 pwm.
* I recommend using 2 pwm pins per motor so spinning motor forward and backward gives similar response.
* if using 1 pwm pin, make sure its pinIN1, then set pinIN2 to any digital pin. I dont recommend this setting because
* we need to use FAST_DECAY in one direction and SLOW_DECAY for the other direction.
*/
MX1508 motorA(PINA,PINB, FAST_DECAY, NUMPWM);
void setup() {}
void loop() {
motorA.motorGo(PWM);
}ライブラリを使用しない場合
/*
MX1508 DC MOTOR DRIVER MODULE
modified on 25 Sep 2020
by Saeed Olfat @ Electropeak
Home
*/
void setup() {
pinMode(8, OUTPUT); //IN2
pinMode(9, OUTPUT); //IN1
}
void loop() {
// Full speed forward
digitalWrite(8, HIGH);
digitalWrite(9, LOW);
delay(3000);
// Full speed backward
digitalWrite(8, LOW);
digitalWrite(9, HIGH);
delay(3000);
// 0 to 100% speed in forward mode
for (int i=0;i<256;i++)
{ digitalWrite(8, HIGH);
analogWrite(9, i);
delay(20);
}
delay(50);
// 0 to 100% speed in backward mode
for (int i=255;i<0;i--)
{ digitalWrite(8, LOW);
analogWrite(9, i);
delay(20);
}
delay(50);
}
引用 ElectroPeak
商品リンク

Bitly
amzn.to
Fritzingのパーツ
見つかりませんでした。